






-
Snake Robot (AX-12 모터)
Introdouction
본 로봇은 24 관절형 스네이크 로봇으로 뱀에 대한 생체모방기술을 응용하여 자유로운 주행을 가능하게 하였으며 사람이 접근 불가능한 지역에 대신 퉁ㅂ되어 환경정보를 수집하는 탐사로봇의 일종이다.
Research Directions
·무동력 바퀴를 이용한 주행
·Bluetooth통신을 원격 제어
·로봇 상태의 PC 모니터링
·카메라를 이용한 주변 환경 송신

-
Snake Robot (서보 모터)
Introdouction
생물학적 뱀이 가지고 있는 특징중 자유로운 이동 모션이나 좁은 공간을 유연하게 통과 하는 성질을 로봇에 응용하여 뱀의 다양한 동작을 구현한다.
Research Directions
·서보 모터를 이용한 다 관절 로봇 제어
·마이크로 프로세서(ATmega128)의 연구
·PDA의 IPDA를 이용한 로봇 제어
·초음파 센서를 이용한 장애물 회피 능력
·LCD에 의한 상태 표시
·온도센서 이용한 로봇 환경에 대한 반응
-
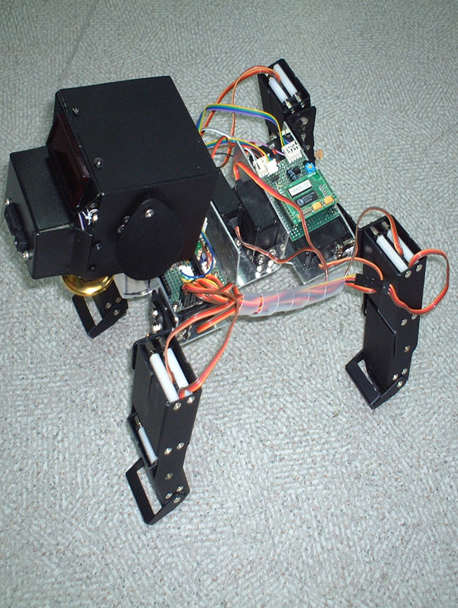
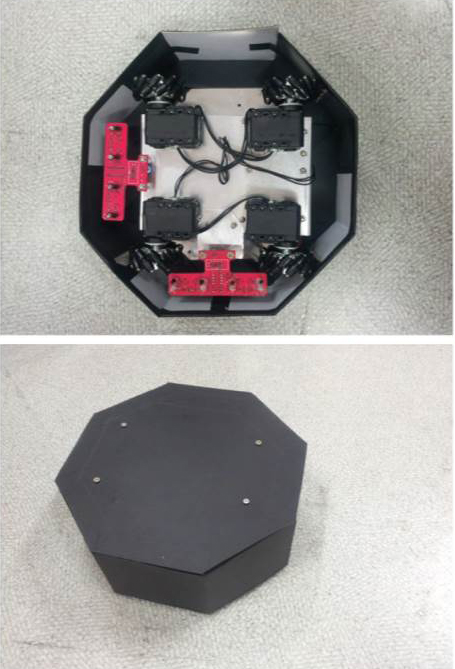
4_Legged Robot
Introdouction
사람과 같은 공간에서 생활하는 애완용 로봇 강아지는 사람의 음성을 인식하고 아예 해당하는 동작을 구현하는 지능형 로봇이다. 기계로서 일을 하는 것이 아니라 애완동물과 같은 다양한 지능형 서비스 로봇이다.
Research Directions
·서브모터를 이용한 관절 형태의 4족 보행 로봇
·음성인식에 의한 움직임 처리
·장애물 회피 능력
·터치센서를 이용한 다양한 감정 표현
·리모트 컨트롤을 이용한 로봇 제어

-
MIRO
Introdouction
난잡한 지형에서도 원활하게 이동할 수 있도록 휠을 개조한 로봇
Research Directions
·서브 모터(AX-12)를 이용한 휠 구동
·마이크로 프로세서(ATmega256)의 연구 ·낮은 계단이나 난잡한 지형에서도 무리 없이 이동
·턴 없이 자유자재로 이동가능
-
L.W-Mecanum(메카넘휠)
Introdouction
메카넘 휠(바퀴)의 특성을 이용한 자유로운 이동과 라인트레이서의 로드 트래킹 기능을 융합하여 안내 로봇 및 안전한 운반로봇을 구현시킨 로봇
Research Directions
·서브 모터를 이용한 메카넘 휠 제어
·마이크로 프로세서(ATmega256)의 연구
·라인트레이서를 이용한 로드 트레킹 가능
·턴 없이 자유자재로 이동가능

-
공룡로봇
Introdouction
·본 로봇은 공룡을 모방한 생체 모방 로봇이며 17관절로 구성됨
·장애물 회피보행, 트래킹 모드 등 자율모드
·아이들의 교육/놀이용 로봇Research Directions
·AT91SAM7S256 MCU
·Dinamixel Dx-117 motor
·알루미늄 프레임
·블루투스 통신
·PSD센서, CDS센서, 터치센서


